




Manual
do
Maker
.
com
Como calcular torque de um motor ou conjunto



Calcular a força será fundamental para projetos elaborados. Normalmente quando fazemos nossos projetos, não nos preocupamos com isso porque compramos kits feitos para o propósito ou então utilizamos motores que suportam bem mais carga do que necessitamos. Um caso comum é ao fazermos carrinhos robôs. Mas quando calculamos nossas próprias engrenagens ou polias (ainda mais em conjuntos), precisamos saber previamente se o motor suportará a carga sobre a qual o motor atuará.
Como calcular torque
O torque é o produto da força multiplicado pela distância, produzindo rotação. Parando o motor, já não há mais torque. Para fazer o teste, temos que ter algo como:


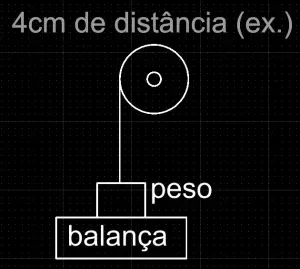
O ideal é que haja simetria na âncora do peso; que ele esteja perpendicular à roda que está no eixo do motor, (em sua tangente), preso ao centro e que o valor do peso seja mensurável pela balança. A 2cm de distância do eixo para um motor com qualquer coisa igual ou inferior a 1kgf.cm, 1kg de massa já é o suficiente.
Quando o motor for ligado, ele não conseguirá erguer o objeto utilizado como peso, mas fará diferença na medição da balança devido à força exercida pelo motor. Veja a diferença medida. Por exemplo, se conseguiu aliviar em 150g, então o motor exerceu 1,5N de força. Como estamos usando cm, para saber o valor N.m devemos dividir o resultado por 100 ao final.
T = 1,5*4/100 = 0,06N.m
1 Newton é a unidade de força utilizada no sistema internacional de unidades, mas usamos também o kgf (kilograma-força). Nós encontramos essa unidade em datasheet de motores diversos. Supondo um motor que não tenhamos o datasheet e o procedimento acima foi necessário, para converter para kgf o resultado que está em N.m, basta multiplicar por 9,8. Isso resultará em 588g. Arrendondemos para 0,6kgf.cm.
Para enfatizar, 1N = 0,1kgf.
Outra forma de medir a força é utilizando um dinamômetro. Existem montes de modelos.



Mas como disse anteriormente, temos a informação de torque no datasheet do respectivo motor. Supondo um servo motor SG90 que tem o torque de 1,8kgf.cm em uma roda de 4cm, teremos 1800/4 = 450g na borda da roda.
Como descobrir o RPM aproximado
Para descobrir o RPM aproximado, coloque uma fita dupla no eixo. Coloque um dedo próximo o suficiente do motor a ponto de tocar a borda da fita dupla (pode ser uma fita crepe, só dê um mínimo de densidade para ela). Nessa mão cujo um dos dedos estará tocando a fita presa ao eixo, esteja segurando um smartphone gravando o som (é bom que o ambiente esteja silencioso nesse momento). Depois, abra o arquivo de áudio em um programa de edição. Recomendo o Audacity, que é gratuito e bastante bom. Pegue uns 10 ciclos (10 ondas completas), some os tempos de cada uma, depois divida por 10 para obter a média. Por fim, multiplique a fração de segundo por 60 para obter o RPM aproximado. Isso é um quebra galho. Certamente é melhor prender algum objeto próximo para fazer esse contato para evitar grandes variações, mas ainda assim podemos considerar uma variação igual ou superior a 10%. Outra opção é utilizar um encoder no motor. Dá pra fazer com sensor de efeito hal, interrupção com laser ou reed switch ou até infravermelho, medindo as interrupções em um Arduino, por exemplo. Mas em qualquer um desses casos foi adicionado carga ao motor, por menor que seja. Ainda assim pode ser uma boa opção, considerando que a medição feita de forma eletrônica será induvidavelmente mais precisa do que uma medição manual.
Como medir o consumo do motor sem carga aproximado
Nesse caso, recomendo um medidor de corrente. Coloque-o com o motor desligado, depois ligue e veja a carga.
Como medir consumo máximo de corrente na perda de força do motor
Coloque uma carga no limite de força do motor, então conectado a um sensor de corrente, ligue o motor e veja o limite de subida, então desligue-o antes que comece aquecer. Seja observador logo na primeira parada dessa subida, é só uma estimativa. Claro que o ideal para todos esses items é ter o datasheet do motor em mãos.
É importante considerar que, se estiver usando uma fonte que fornece menos corrente do que o motor consome, perde-se eficiência.
Como calcular o torque em conjuntos mecânicos
Agora podemos juntar os conceitos citados anteriormente em outros artigos. Para que possamos fazer nossas próprias engrenagens a serem utilizadas em nossos projetos, precisamos considerar a velocidade do motor, diâmetro da polia ou engrenagem sobre o motor, torque e tamanho total do projeto. Nesse último caso, citei o tamanho porque devemos considerar que não basta calcular as engrenagens, não adianta ter rodas de 50cm para colocar em um braço robótico com 15cm de altura por 10 de largura.
Podemos equilibrar essas condições variando a velocidade do motor para se ajustar a uma engrenagem no eixo motor que comporte a transmissão de força necessária para o conjunto. Ainda, podemos compensar a necessidade de força ou velocidade também através da alteração do conjunto, calculando cada par, como descrito no artigo anterior. Além de engrenagens com contato direto, podemos utilizar pinhões, como será o caso do relógio Cuco, cujo projeto será mostrado em breve.


Primeiro, o que já citei em outros artigos, engrenagens ou polias iguais tem a mesma relação. Nesse caso, não há variação no torque nem na velocidade. Tendo duas engrenagens idênticas em contato, a única mudança é a direção.
A variação do torque também deve ser medida por partes do conjunto, como se fosse o cálculo de RPM explicado no artigo anterior; aos pares. Pegando as primeiras duas engrenagens do conjunto (motora e movida), utiliza-se o cálculo:
M1/M2 = n2/n1 M1 é o torque aplicado na engrenagem 1 em N.m.
M2 é o torque obtido na engrenagem 2, também em N.m.
n1,n2 são os números de dentes das engrenagens.
Para ajudar no raciocínio, lembremos do exemplo já dado: Erga um kg de açucar com o braço esticado. Depois, coloque esse 1kg de açucar sobre a base de uma vassoura e ao tentar erguer, provavelmente você não conseguirá fazê-lo. No conjunto de engrenagens, a transmissão de força funciona de forma contrária, como se fosse uma alavanca, onde a alavanca é o ponto de contato das engrenagens até o centro do eixo da segunda engrenagem.
Por fim, quando calculamos o conjunto para um motor que rodará em apenas uma direção e não temos o controle da direção no motor, podemos colocar uma engrenagem idêntica em alguma parte do conjunto para mudar a direção.
Existem mais um monte de conceitos importantes que não vou arriscar detalhar os conceitos para não errar. Aliás, posso ter explicado algo de forma errada nesse artigo mesmo, faça os testes e comprove!
Veja um pouco mais sobre cálculo de motores PMDC e reduções nesse artigo da RoboCore.
Parei com os artigos teóricos por enquanto, ok?
Inscreva-se no nosso canal Manual do Maker no YouTube.
Também estamos no Instagram.



Djames Suhanko
Autor do blog "Do bit Ao Byte / Manual do Maker".
Viciado em embarcados desde 2006.
LinuxUser 158.760, desde 1997.