




Manual
do
Maker
.
com
Como configurar a UART no Raspberry Pi Pico



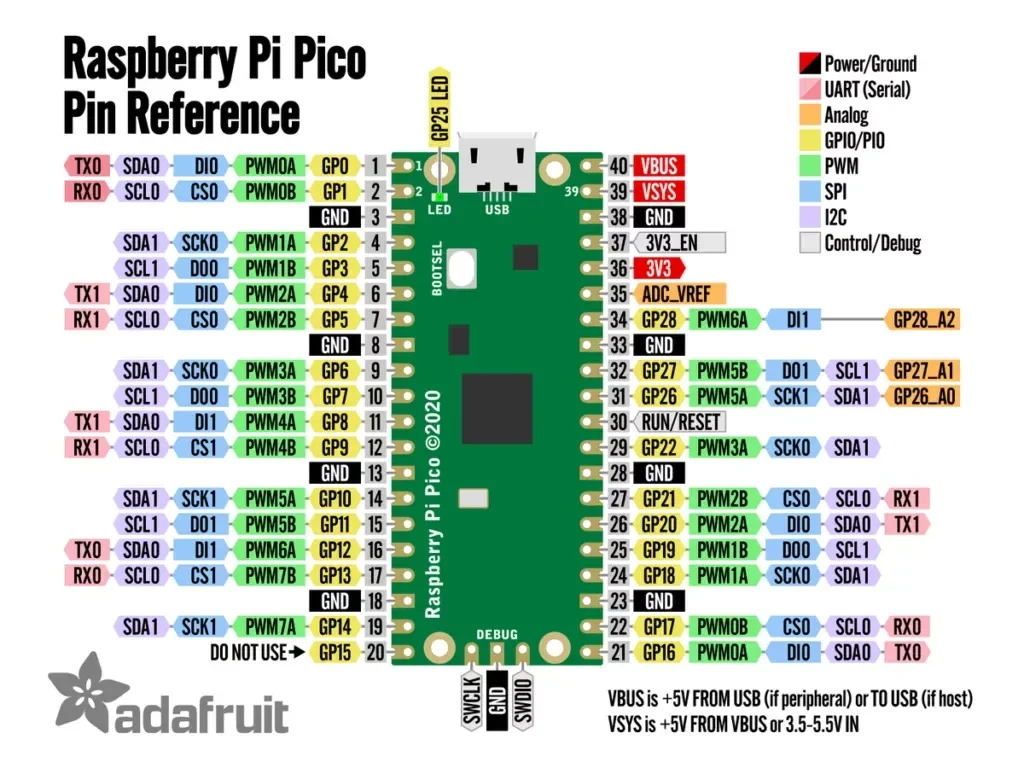
Mais uma vez fui escrever sobre um determinado tema e acabei notando a necessidade de uma introdução sobre outro tema: Configurar a UART no Raspberry Pi Pico, usando MicroPython. Antes de adentrarmos no tema, já será bom reparar no pinout da placa para simplificar o entendimento.


Como saber os pinos usados na UART?
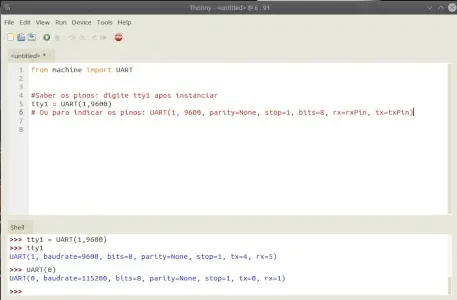
Configurar a UART é facílimo, a questão maior é que precisamos fazer o wiring após isso. Configurando uma segunda UART, quais são os pinos padrão? Não precisamos nem saber quais os pinos TX e RX se estivermos utilizando MicroPython. Nesse caso, basta importar o módulo UART da machine desse jeito:
from machine import UART
UART(0)
tty1 = UART(1,9600)
tty1
No exemplo acima, apenas passando a UART no terminal já pegamos as configurações completas da serial. A segunda foi instanciada em tty1. Fazer uma chamada vazia ao tty1 também retornará suas respectivas configurações.


Como selecionar o pino para UART?
Na imagem acima já está a dica. Podemos definir todas as configurações relacionadas à UART utilizando:
tty1 = UART(1, 9600, parity=None, stop=1, bits=8, rx=rxPin, tx=txPin)
Serial.available() no Raspberry Pi Pico?
Essa é uma chamada clássica da API do Arduino. No MicroPython usamos:
while tty1.any():
print(tty1.read(1))
Assim lemos, através de um loop, todos os dados que estiverem no buffer. Também podemos prender a execução no loop da UART até que haja dados a serem lidos:
from time import sleep
while not tty1.any():
sleep(0.1) #100ms
while tty1.any():
print(tty1.read(1))
Para usar o sleep precisamos importá-lo do módulo time. Depois podemos fracionar o tempo, como acima.
Como usar a UART no Raspberry Pi Pico
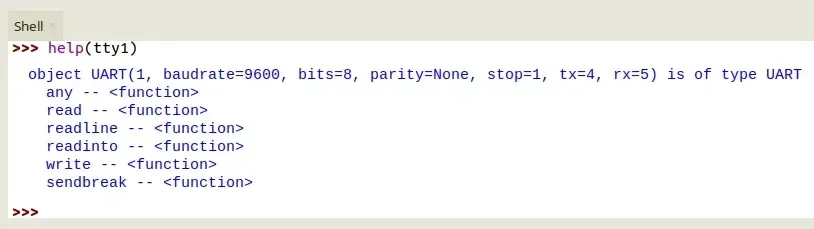
Já vimos como configurar a UART no Raspberry Pi Pico, mas ainda precisamos usar. Tem dúvidas das funções a utilizar? Não sabe os nomes? - Sem problemas, use o help:


Mais dicas sobre Raspberry Pi Pico
Nem todo mundo gosta da simplicidade do MicroPython, mas aqui no blog tem já bastante material sobre ele, principalmente com ESP8266. Use a caixa de pesquisa no canto superior direito.
Sobre a Raspberry Pi Pico, ainda estamos no começo dos tutoriais, por isso ainda dá pra listar o que já foi escrito, caso não tenha acompanhado os artigos:
- UART na Raspberry Pi Pico - Outra abordagem; C e interface com RPi 4.
- Como usar MicroPython na Raspberry Pi Pico - Essa é pra qualquer um que queira começar, mesmo sem saber nada.
- Como programar a Raspberry Pi Pico no Linux - Configurando o ambiente para programação e debug.
- Como configurar GPIO e serial na RP Pico - Já deu pra ver que um só tema tem assunto, hum? Esse é em C.
- Como Programar a Raspberry Pi Pico - Usando a RPi4, é a maneira mais fácil para programar em C.
- RP Pico - Essa é a introdução.
Onde comprar a Raspberry Pi Pico?
Essa placa está com um excelente preço na Robocore, pegue sua RP Pico e comece essa série com a gente!
Revisão: Ricardo Amaral de Andrade
Inscreva-se no nosso canal Manual do Maker no YouTube.
Também estamos no Instagram.



Djames Suhanko
Autor do blog "Do bit Ao Byte / Manual do Maker".
Viciado em embarcados desde 2006.
LinuxUser 158.760, desde 1997.