




Manual
do
Maker
.
com
Acelerômetro, giroscópio, bússola, altímetro, barômetro - IMU


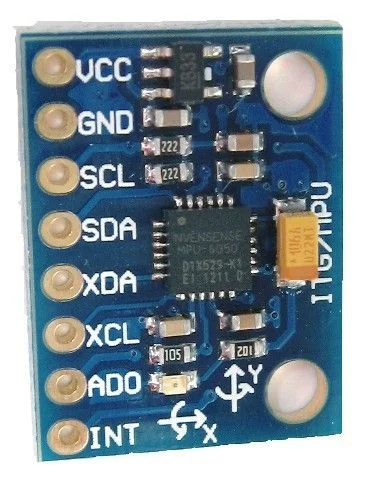
IMU - ou Inertial Measurement Unit - é um dispositivo que agregue 2 ou mais desses sensores do título desse post. O MPU6050 é um bom exemplo. Ele possui acelerômetro e giroscópio, além de um sensor de temperatura (cujo propósito ainda se encobre frente à minha ignorância). Estes sensores tem 3 eixo de medição cada, de forma que a resposta de saída pode conter 6 valores. Isso também significa que ele tem 6 graus de liberdade, cujo acrônimo é DOF (Degree Of Freedom). Popularmente você encontrará o termo "six axis", ou 6 eixos.
O primeiro post que fiz sobre o MPU6050 teve o propósito fundamental de referenciar a biblioteca e a necessidade de calibragem, de forma que sequer fiz video ou exemplos. Mas esse post é outra parte integrante de um projeto que (se tudo der certo) pretendo publicar em breve.
Apesar de dispensável, é bom saber como cada um dos sensores funciona para entender o conjunto da obra.
Como funciona o acelerômetro?
Pense em uma caixa de 6 lados iguais e dentro uma bola de aproximadamente 1/4 de seu tamanho. Se você tomar a caixa em suas mãos e rodopiar com seu corpo rapidamente para a direita, a bola que está dentro da caixa vai encostar na parede oposta, certo?
Do mesmo modo, se você erguer a caixa e então baixá-la rapidamente, a bola em seu interior tocará o topo da caixa. O acelerômetro funciona de forma muito similar, mas suas paredes são sensíveis ao toque. Então, quando o sensor é deslocado de cima para baixo, graças à força exercida sobre ele, é percebida a direção de deslocamento.
Se o deslocamento for diagonal, do mesmo modo é percebido porque 2 das paredes são tocadas ao mesmo tempo. Isso é o conceito básico, claro que há muito mais precisão do que isso e envolve muito mais tecnologia do que esse exemplo primitivo, mas uma última informação muito importante é que o acelerômetro trabalha sobre o principio de piezo elétrico. Isso fará sentido mais adiante.
Nesse ponto já deve estar claro que os 3 eixos a que se refere o sensor representa X, Y e Z, cobrindo assim todas as direções.
Como funciona o giroscópio?
O giroscópio mede a velocidade angular. Isto é, suponha um disco rígido girando enquanto é feita a leitura dos dados. Ele está rodando constantemente sobre o eixo Z (eixo ao qual a força é exercida) enquanto os outros 2 eixos não reagem a nenhuma força, portanto medindo 0.
Um exemplo de medição seria 1 volta por segundo, o que representaria 360 graus ou, 360/1. A direção em que ele está girando também é reconhecida. Mas dependendo da aplicação, pode não haver giro, mas apenas deslocamento de graus, o que é bastante comum por exemplo em drones. Graças à detecção dessas pequenas variações, é possível estabilizar seu voo. Essa última informação também é muito importante, apesar de parecer comum e óbvia, mas guarde isso porque será aplicada ao post do projeto secreto.
Outra informação importantíssima é que nem a aceleração nem a velocidade linear afetam a medição de giro.
Como funciona uma bússola digital?
Primeiro é necessário saber como funciona uma bússola mecânica (se é que esse nome serve). Primeiro porque tem a bússola magnética e em segundo porque existe a bússola giroscópica. Nesse caso, você já deve ter percebido que essa bússola giroscópica possui também 3 eixos, enquanto a bússola magnética apenas aponta para o norte. A bússola reage ao pólo magnético da terra, possui algumas variações causadas por declinação, mas o propósito aqui não é explicar esses detalhes.
A bússola giroscópica mecânica tem o propósito de corrigir as inclinações causadas por morros, influências marítimas, inclinação dos aviões, etc.
A bússola digital ou bússola eletrônica (talvez a segunda denominação seja mais propícia) utiliza a tecnologia magneto-indutiva, lendo as variações no campo magnético da terra. Por se tratar de um dispositivo sensível a campos magnéticos, diversos cuidados periféricos devem ser tomados, como por exemplo considerar a massa metálica próxima do sensor, campos eletro-magnéticos e interferências causadas por circuitos ou fontes próximas a ele.
Em um próximo e breve post devo exemplificar a configuração de um sensor desses que inclusive já estou em posse dele.
Por fim, seu propósito é indicar a direção em que se está seguindo e alguns desses sensores podem ser integrados ao MPU6050, de forma a caracterizar um IMU com 9 eixos!
Como funciona o altímetro?
O altímetro reage à força da gravidade da terra. Também, as moléculas do ar são mais dispersas em altitudes maiores, portanto a medição da pressão do ar é uma das formas de medir altitude. A altitude é medida em relação ao nível do mar.
Em breve escreverei um post também sobre um sensor desses, ainda estou aguardando sua chegada, mas já foi adquirido também - e não, esse sensor não faz parte do projeto que pretendo apresentar (se tudo der certo).
Como funciona um barômetro?
Esse sensor é utilizado para medir pressão atmosférica e é auxiliador na medição de condições climáticas, uma vez que a pressão atmosférica se modifica conforme tais condições. Estou aguardando também a chegada desse sensor, escreverei algo a respeito tão breve quanto possível.
Inscreva-se no nosso canal Manual do Maker Brasil no YouTube.
Próximo post a caminho!



Djames Suhanko
Autor do blog "Do bit Ao Byte / Manual do Maker".
Viciado em embarcados desde 2006.
LinuxUser 158.760, desde 1997.